 Español
Español  English (UK)
English (UK) 
Hace algunos meses me decidí a compra un kti de robótica para programarlo con los niños. Elegí un modelo muy extendido que incluso se puede llegar a fabricar uno mismo a partir de una lámina acrílica o un material similar. La idea era usarlo con una ESP32, dado que es lo que uso habitualmente (junto con las ESP32 y últimamente las Rasberry Pi Pico) y programarlo a través de Arduinoblocks ya que ofrece una programación idéntica a la de Scratch y eso viene muy bien para que los más pequeños experimenten y aprendan.
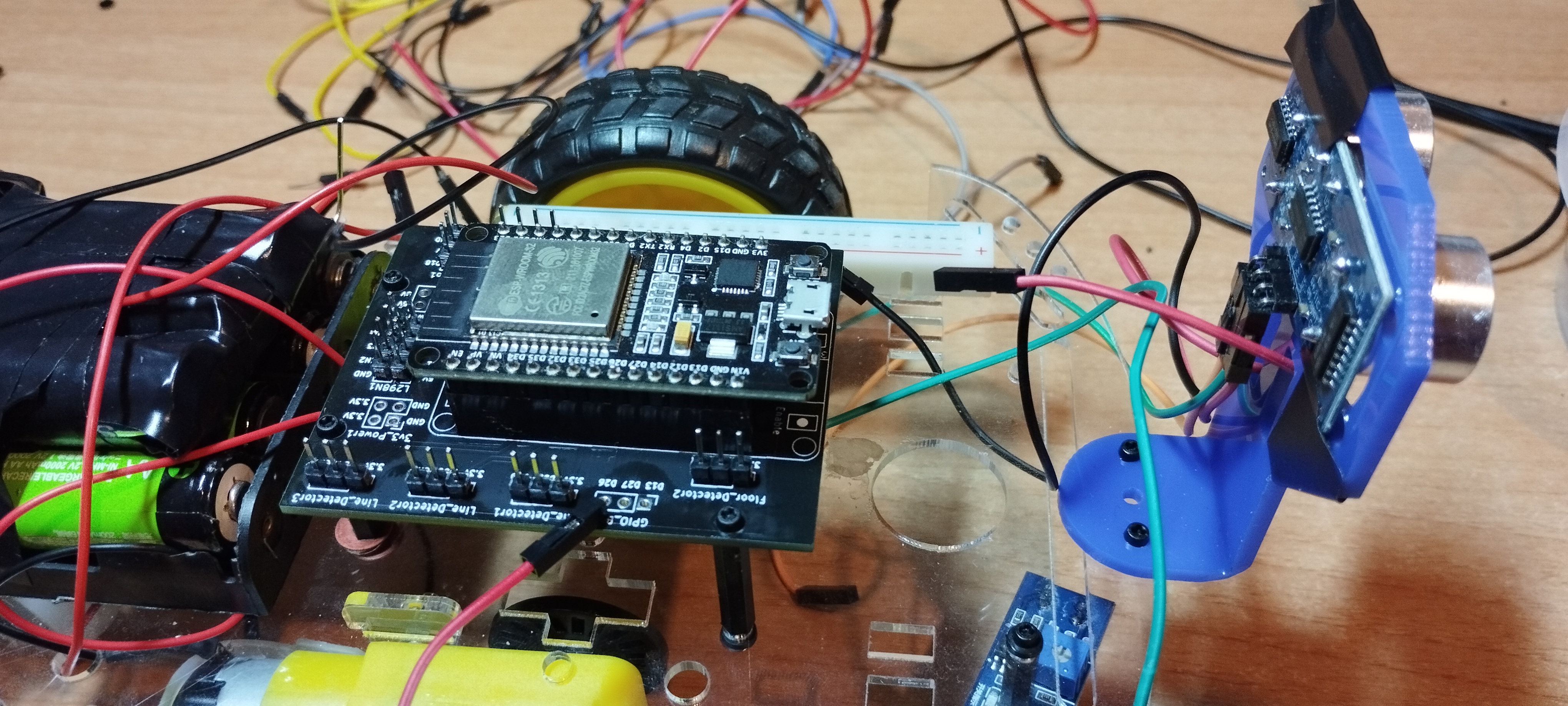
El kit en cuestión tiene multitud de agujeros para acoplar algunos dispositivos pero está especialmente diseñado para montar en el un Arduino Uno. Las placas ESP32 son bastante más pequeñas, pero a la hora de hacer las conexiones al controlador de los motores y a los sensores no quedaba nada bien y no era posible fijarla al chasis. Entonces me puse a diseñar una placa en Kicad para insertar la placa ESP32 y, además, con conexiones preparadas para conectar sensores, servos y, por su puesto, un controlador de motor.
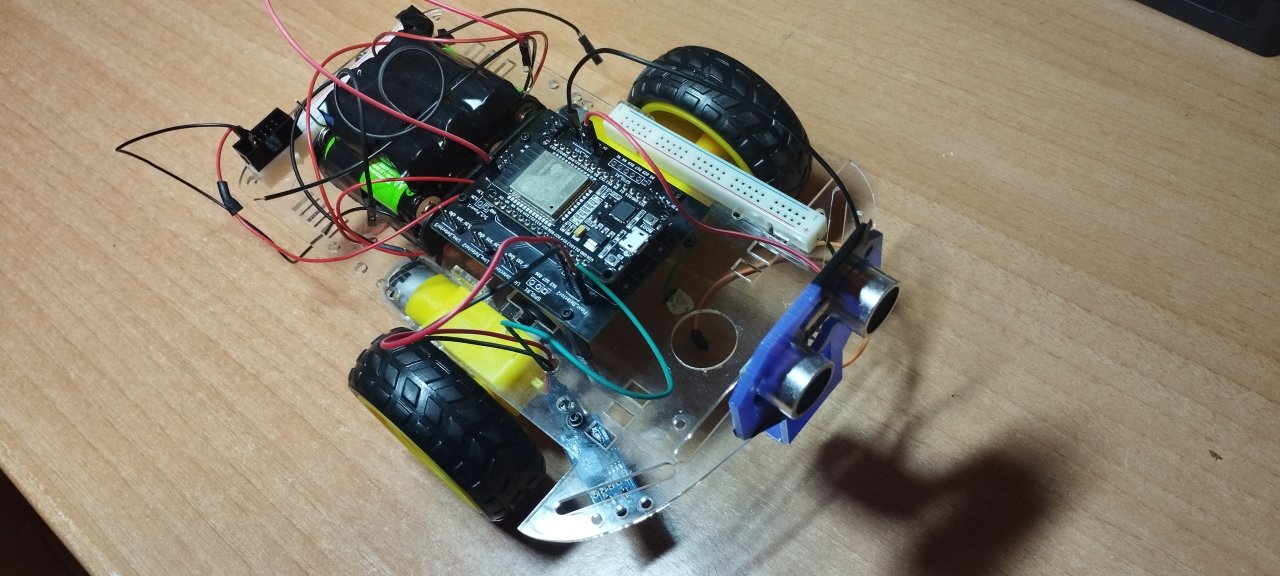
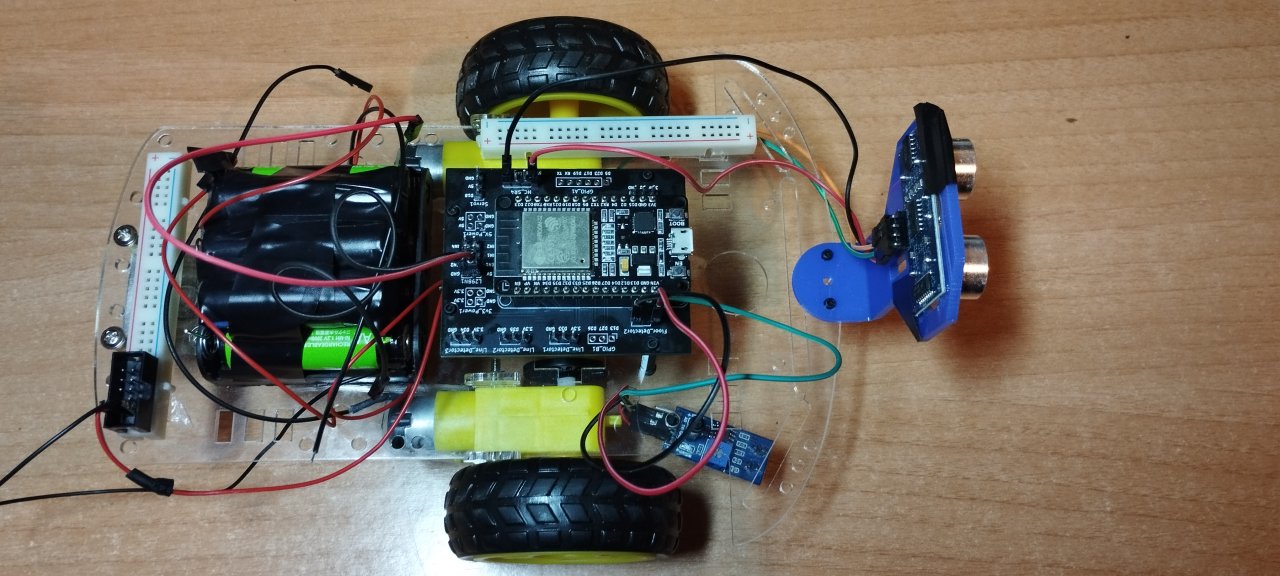
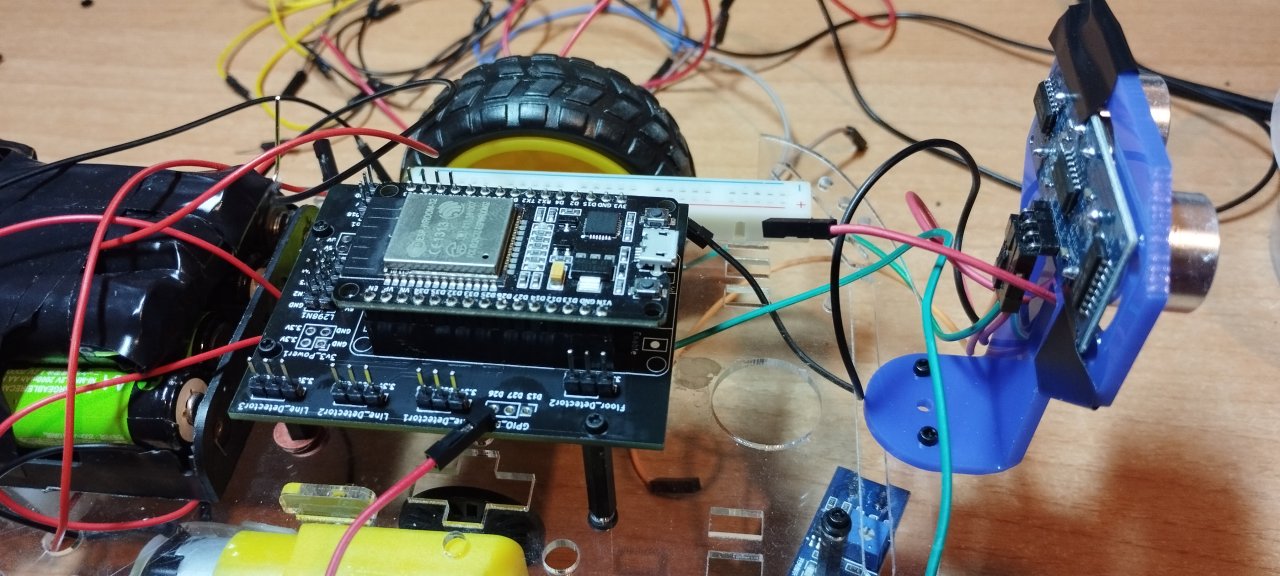
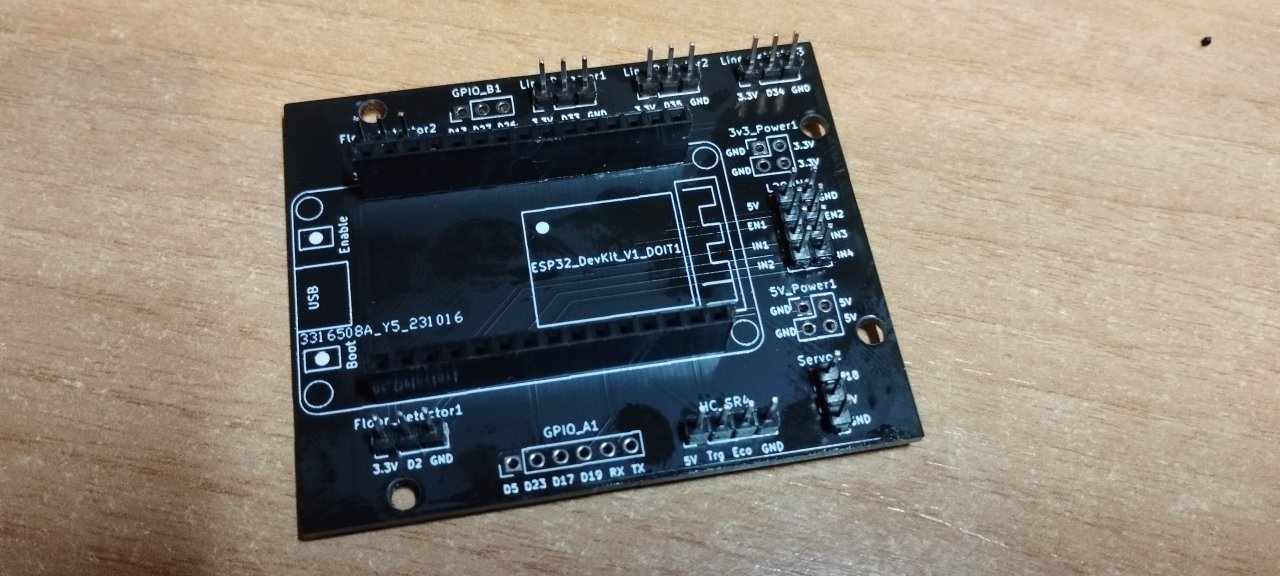
El resultado se puede ver en las fotos y, por supuesto, mejoraba la situación anterior. La placa del microcontrolador queda bien fijada y tiene diversos puntos preparados para conectar hasta 5 sensores de proximidad, un sensor de ultrasonidos, un servo, un controlador L298N. Incluso los pines sobrantes quedan expuestos por si se quiere hacer uso de ellos controlando más mecanismos u obteniendo datos de otros sensores. Por último, tiene los agujeros de montaje dispuestos del mismo modo que la Arduino Uno, con lo que queda perfectamente fijada en el kit.
En cuanto al diseño, hay un par de cosas a mejorar. La primera de ellas es que es difícil de programar a través del microusb una vez montado todo, dado que el cable tropieza con el soporte del sensor de ultrasonidos. Más importante todavía es que la energía suministrada no es suficiente para motores, servo, microcontrolador y sensores. Así que, en definitiva, se avecina una nueva versión para intentar solucionar estos problemas. Podéis encontrar todo lo relacionado con este proyecto en el repo de Github, aunque en el momento de escribir esto recomendaría esperar a una nueva versión.
Por cierto tengo que reconocer que de momento el que más está jugando con esto soy yo. Los niños has bautizado al robot como Roombi, ya que se comporta como el robot de limpieza pero tengo la impresión de que les gusta más hacer las cosas habituales en Scratch que mover servos o motores.